
ahidalgop@unex.es & mavega@unex.es & ferruz@cartuja.us.es & npavon@dti.uhu.es
University of Extremadura & University of Extremadura & University of Sevilla & University of Huelva
|
|
|
Alejandro Hidalgo-Paniagua & Miguel A. Vega-Rodríguez & Joaquín Ferruz & Nieves Pavón
ahidalgop@unex.es & mavega@unex.es & ferruz@cartuja.us.es & npavon@dti.uhu.es University of Extremadura & University of Extremadura & University of Sevilla & University of Huelva |
Introduction
In mobile robotics, one of the main problems consists of finding a feasible path to go from a starting point to a target point in a specific environment.
This problem is known as the Path Planning (PP) problem or the Motion Planning problem.
A feasible path refers to a path in which the robot can move to the target point without colliding with environment's objects (path safety). Furthermore, this problem can be addressed by optimizing several objetives in order to get better paths. These possible objectives could be the
path length and the path smoothness.
On the other hand, a novel field inside robotics is the field known as Evolutionary Robotics (ER). ER develops the robot's controllers applying Evolutionary Algorithms (EAs).
These EAs can be modified to handle several objectives. These modified EAs are known as MOEAs (Multi-Objetive Evolutionary Algorithms). The PP problem is a good candidate to be solved by using MOEAs.
Datasets
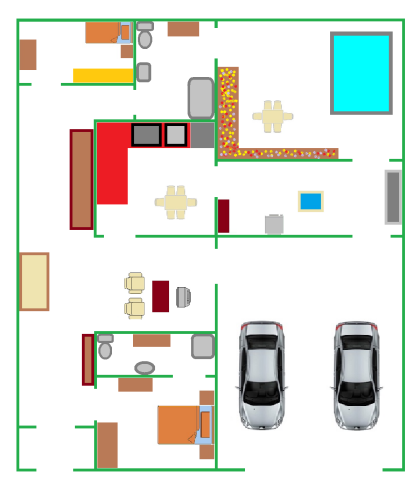
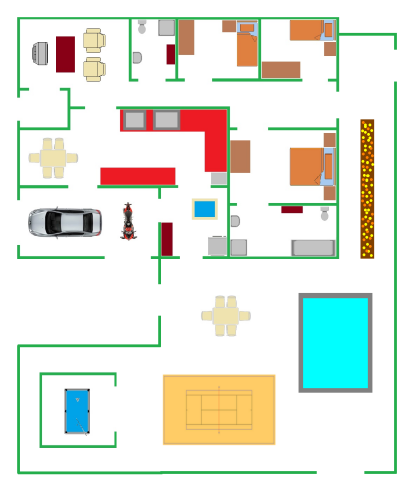
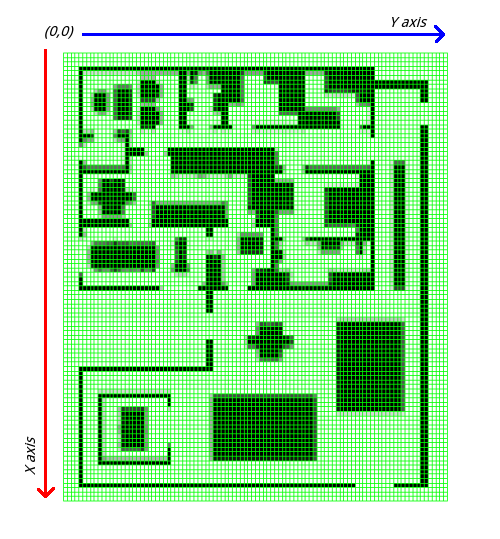
In order to test the developed algorithms to solve the PP problem, we used two realistic maps of indoor environments. Figures 1 and 2 show these maps.
|
|
|
|
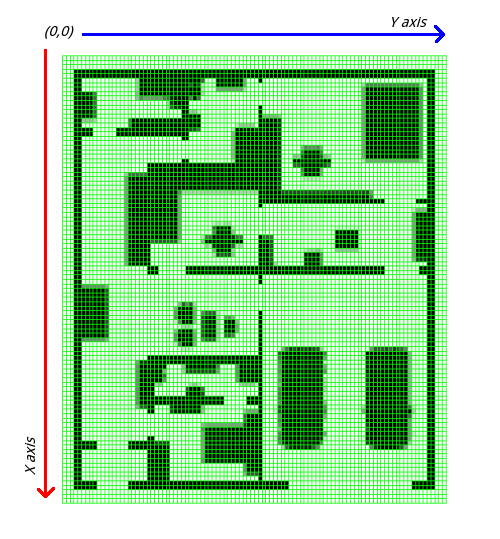
The maps are available as occupancy matrices too. These matrices have a size equal to 100 rows * 100 columns. Each value of a matrix cell corresponds with a gray level percentage. The data files are plain text and each line of the file corresponds with a row of the matrix. All values in a file line are separated by a comma character (',') and they refers to the matrix columns. These data files can be downloaded from the following links:
In order to test our algorithms, we established four scenarios corresponding with the following directions of a map: the main diagonal of the map (MD), the secondary diagonal of the map (SD), the direction corresponding with the vertical axis (VA), and the direction corresponding with the horizontal axis of the map (HA). We suggest you to use these scenarios to test your algorithms and compare with us (see Table 1).
| Map | Direction | Starting point (X,Y) | Target point (X,Y) |
| Map A | SD | (93,6) | (23,75) |
| Map A | MD | (93,93) | (6,11) |
| Map A | VA | (83,32) | (11,26) |
| Map A | HA | (31,8) | (35,89) |
| Map B | SD | (94,6) | (9,90) |
| Map B | MD | (94,90) | (6,6) |
| Map B | VA | (93,48) | (6,49) |
| Map B | HA | (28,17) | (46,91) |